箱体货物搬运机械手
箱体货物在搬运时,如何做到高效同时又能保障货物的安全?下面为大家介绍一款箱体货物搬运机械手的设计方案。
项目需求
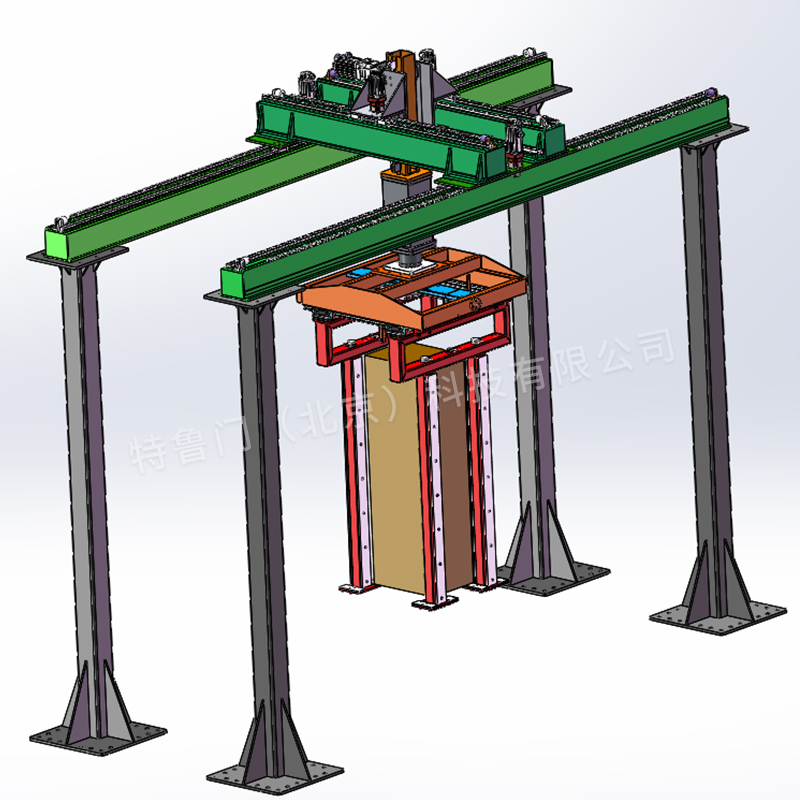
利用桁架机械手抓取搬运箱体货物放到指定位置,实现高效自动化作业。货物形状如下图所示,长600mm,宽450mm,高1800mm。货物重量200~250kg。速度为1.5min一个动作循环。夹爪还需要能旋转90度 。
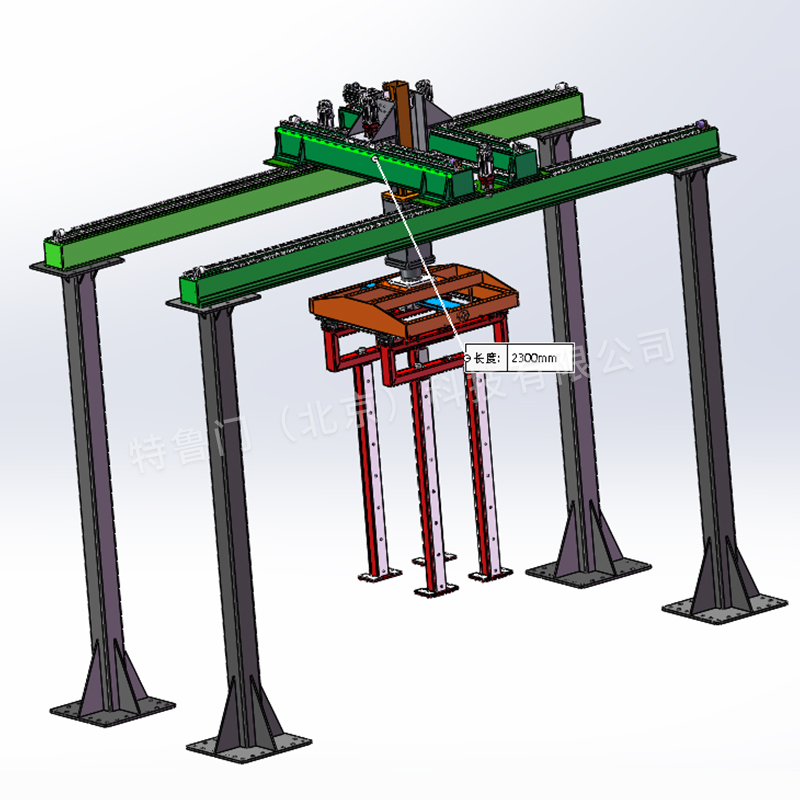
总体方案及布局
箱体货物抓取系统桁架由:整体立柱,X轴行走纵梁、Y轴行走横梁、Z轴升降轴,Z轴旋转轴和多功能抓手组成。
设备主要参数
设备载荷 | 250kg |
X轴行程 | 3m |
Y轴行程 | 1.5m |
Z轴行程 | 0.06m |
X轴速度 | 0.07m/s |
Y轴速度 | 0.03m/s |
Z轴速度 | 0.02m/s |
重复定位精度 | ±1mm |
多功能夹手
夹手采用Q235B 钢材焊接成形,通过伺服电机和丝杠调节 ,可适应600mm~660mm宽度产品。
特鲁门科技注于各类桁架机械手的设计研发与生产制造,对客户需求和工况进行充分分析,以解决客户痛点为导向进行方案设计,您有需要可以联系我们!
 售前咨询专员
售前咨询专员
